Stepmotor 28BYJ-48 inkl. Driver Board ULN2003 med Arduino UNO
Materialer:
- Arduino UNO kompatibel
- USB kabel 50 cm
- Stepmotor 28BYJ-48 inkl. Driver Board ULN2003
- Batteriboks til 4 AA batterier med on/off
- M/F ledninger til at forbinde Arduino UNO boardet med Driver Board ULN
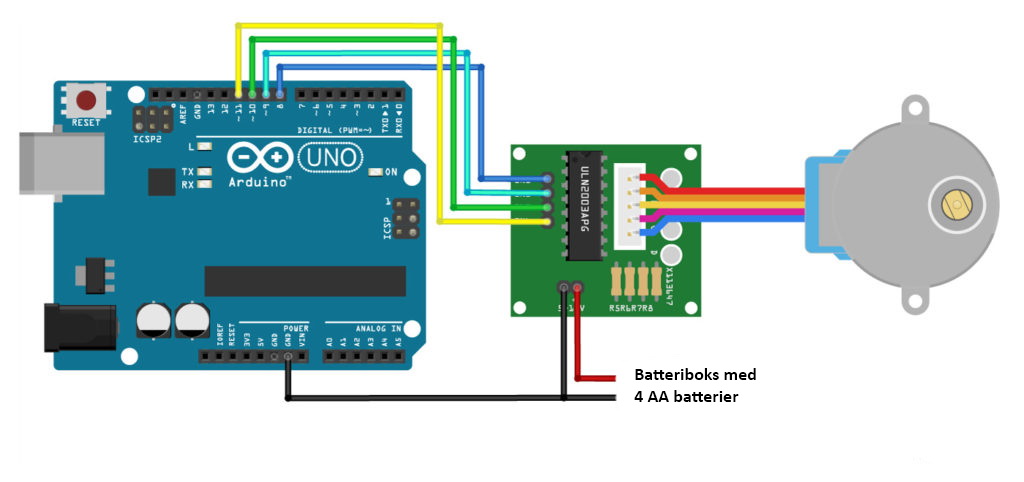
Kredsløbsopstilling:
Eksempler på programmer:
Program 1:
/*
Stepper Motor Demonstration 1
Stepper-Demo1.ino
Demonstrates 28BYJ-48 Unipolar Stepper with ULN2003 Driver
Uses Arduino Stepper Library
*/
//Include the Arduino Stepper Library
#include <Stepper.h>
// Define Constants
// Number of steps per internal motor revolution
const float STEPS_PER_REV = 32;
// Amount of Gear Reduction
const float GEAR_RED = 64;
// Number of steps per geared output rotation
const float STEPS_PER_OUT_REV = STEPS_PER_REV * GEAR_RED;
// Define Variables
// Number of Steps Required
int StepsRequired;
// Create Instance of Stepper Class
// Specify Pins used for motor coils
// The pins used are 8,9,10,11
// Connected to ULN2003 Motor Driver In1, In2, In3, In4
// Pins entered in sequence 1-3-2-4 for proper step sequencing
Stepper steppermotor(STEPS_PER_REV, 8, 10, 9, 11);
void setup()
{
// Nothing (Stepper Library sets pins as outputs)
}
void loop()
{
// Slow – 4-step CW sequence to observe lights on driver board
steppermotor.setSpeed(1);
StepsRequired = 4;
steppermotor.step(StepsRequired);
delay(2000);
// Rotate CW 1/2 turn slowly
StepsRequired = STEPS_PER_OUT_REV / 2;
steppermotor.setSpeed(100);
steppermotor.step(StepsRequired);
delay(1000);
// Rotate CCW 1/2 turn quickly
StepsRequired = – STEPS_PER_OUT_REV / 2;
steppermotor.setSpeed(700);
steppermotor.step(StepsRequired);
delay(2000);
}
Program 2:
/* Example sketch to control a 28BYJ-48 stepper motor with ULN2003 driver board and Arduino UNO.
// Include the Arduino Stepper.h library:
#include <Stepper.h>
// Define number of steps per rotation:
const int stepsPerRevolution = 2048;
// Wiring:
// Pin 8 to IN1 on the ULN2003 driver
// Pin 9 to IN2 on the ULN2003 driver
// Pin 10 to IN3 on the ULN2003 driver
// Pin 11 to IN4 on the ULN2003 driver
// Create stepper object called ‘myStepper’, note the pin order:
Stepper myStepper = Stepper(stepsPerRevolution, 8, 10, 9, 11);
void setup() {
// Set the speed to 5 rpm:
myStepper.setSpeed(5);
// Begin Serial communication at a baud rate of 9600:
Serial.begin(9600);
}
void loop() {
// Step one revolution in one direction:
Serial.println(“clockwise”);
myStepper.step(stepsPerRevolution);
delay(500);
// Step one revolution in the other direction:
Serial.println(“counterclockwise”);
myStepper.step(-stepsPerRevolution);
delay(500);
}