Micro:bit Line Follower Robot “Alfa-1a”
Line Follower Robot “Alfa-1a”.
Materialer til denne Line Follower Robot “Alfa-1a” (excl. Edge Connecter Breakout Board og BBC micro:bit startsæt).
Projektsættet indeholder:
- Et chassis med huller til den lille holder, hvor batteriboksen skal være, huller til holderne, hvor servomotorerne skal være m.m.
- To servomotorer (360 grader)
- To holdere til montering af servomotorer
- To gummihjul, som skrues på servomotorerne
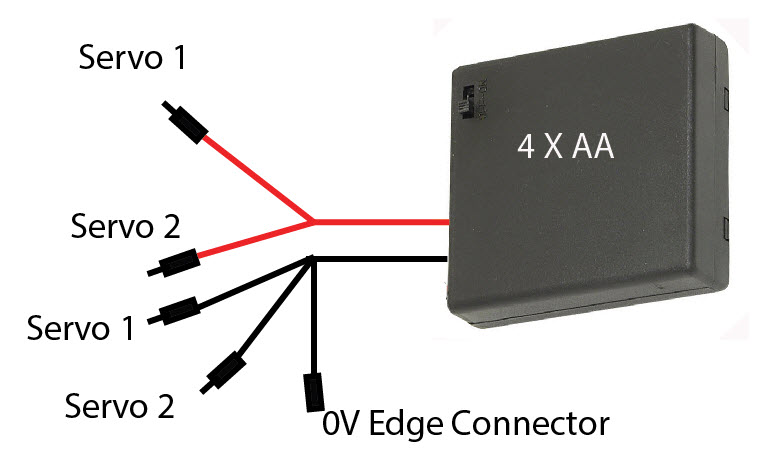
- En batteriboks til fire AA batterier med on/off og ledninger til servomotorer
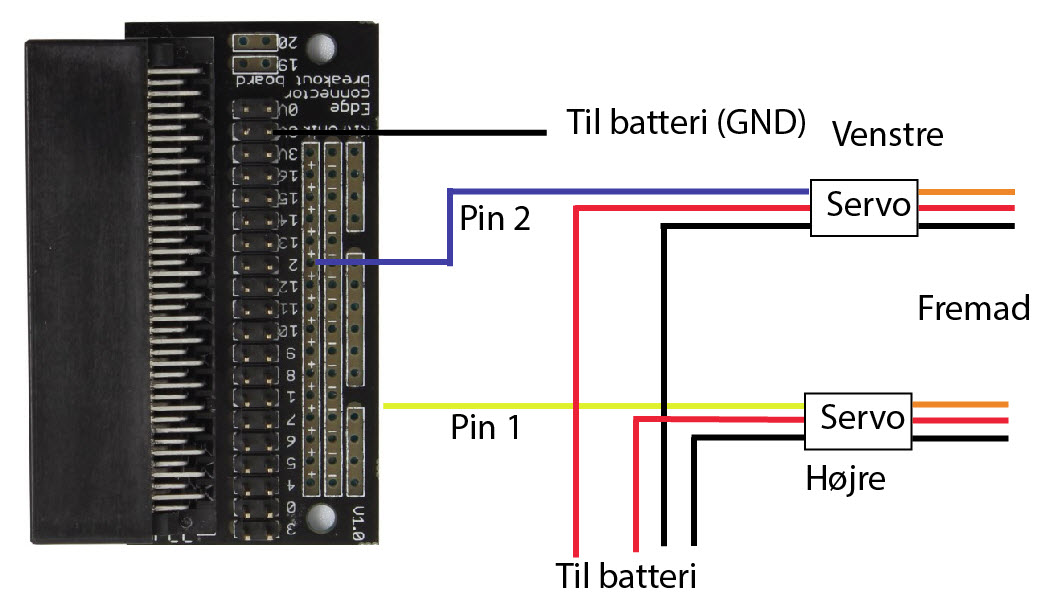
- To ledninger (gul og blå) at forbinde servomotorer med Edge Connecter Breakout Board
- En holder til batteriboksen med kuglehjul
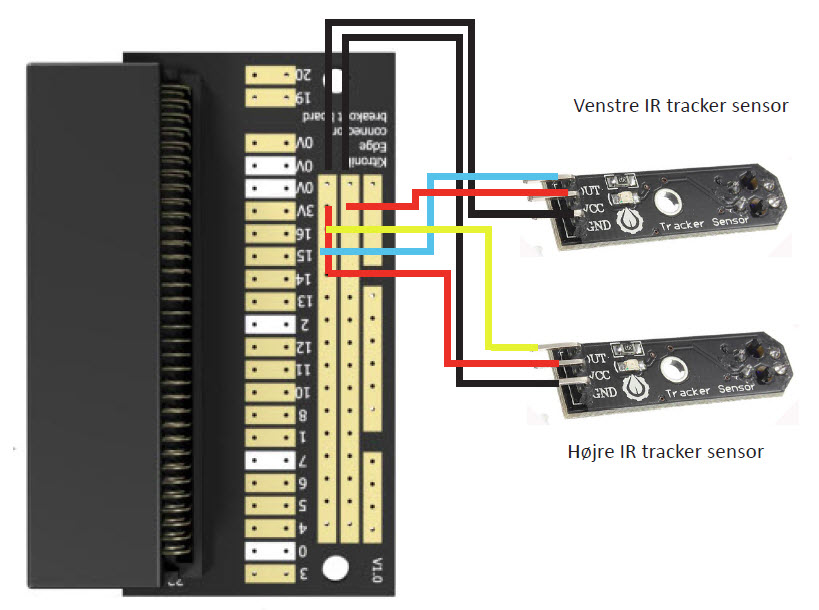
- 6 ledninger (f/f) til af forbinde IR tracker sensorerne med Edge Connecter Breakout Board
Køb projektsæt til Line Follower Robot “Alfa-1a”.
Samlevejledning

Holderen til batteriboksen sættes på chassiset med to maskinskruer og møtrikker.
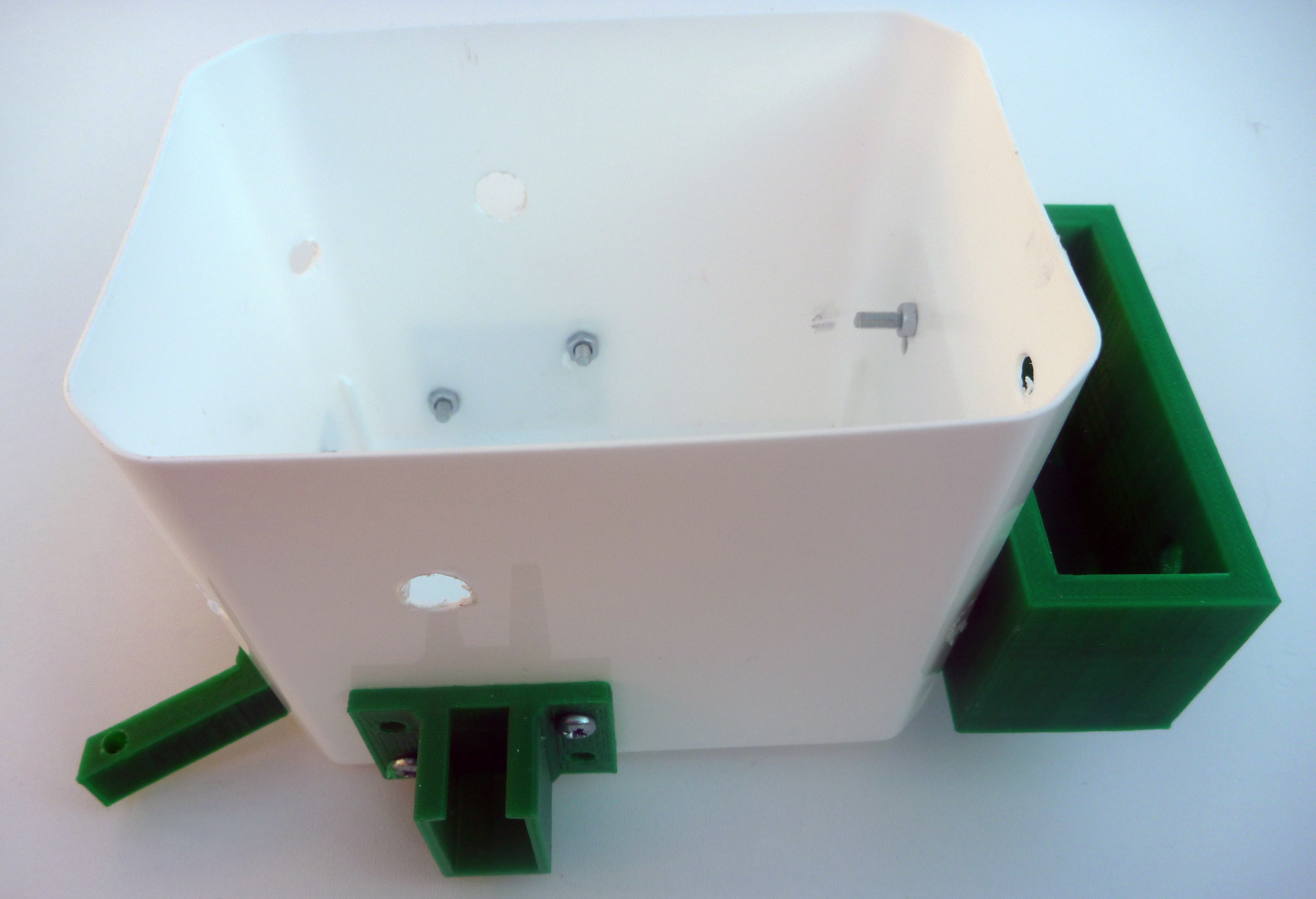
Holderne til de to servomotorer og holderen til IR tracker sensorer fastgøres til chassiset
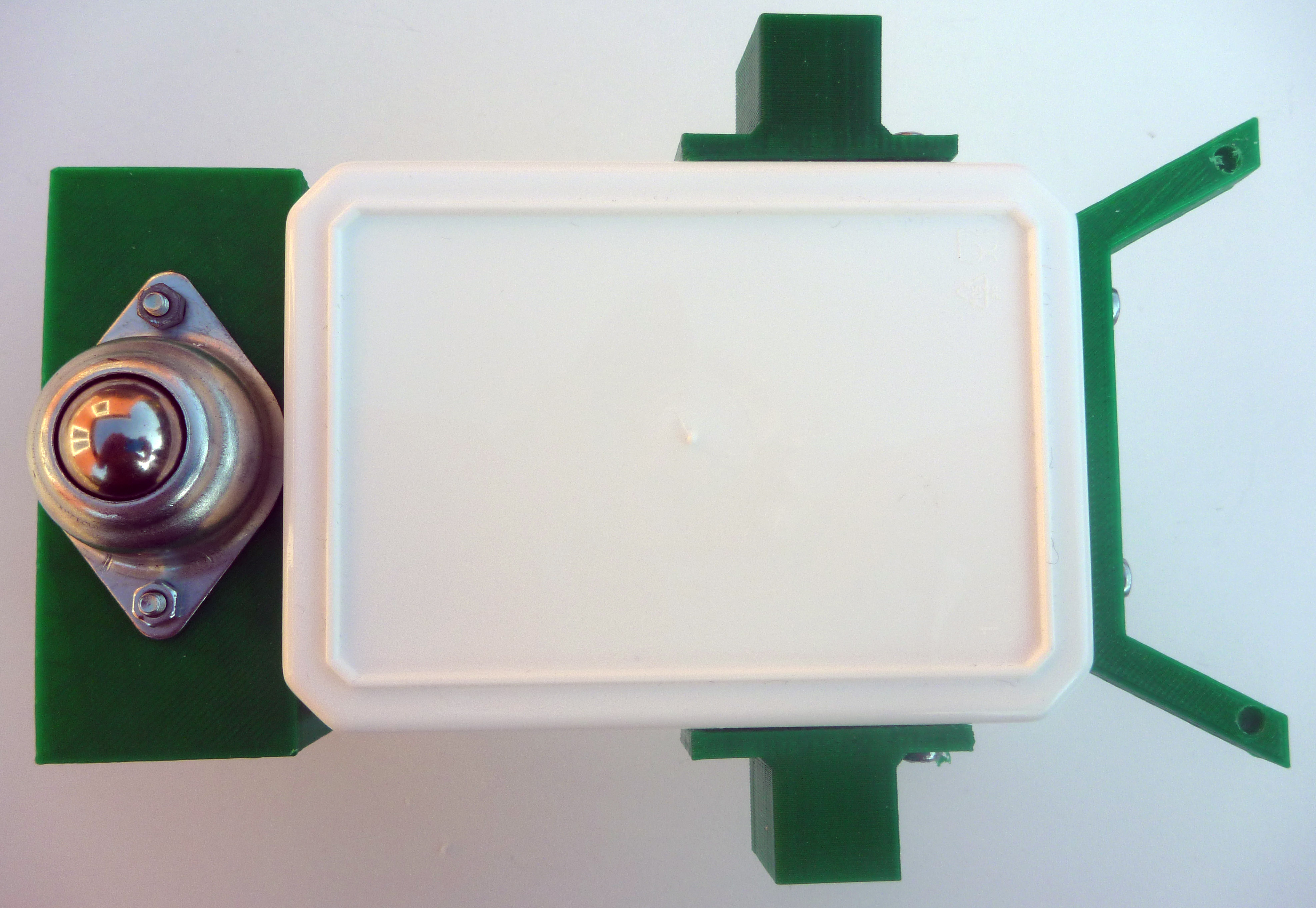
Kuglehjulet skrues på.
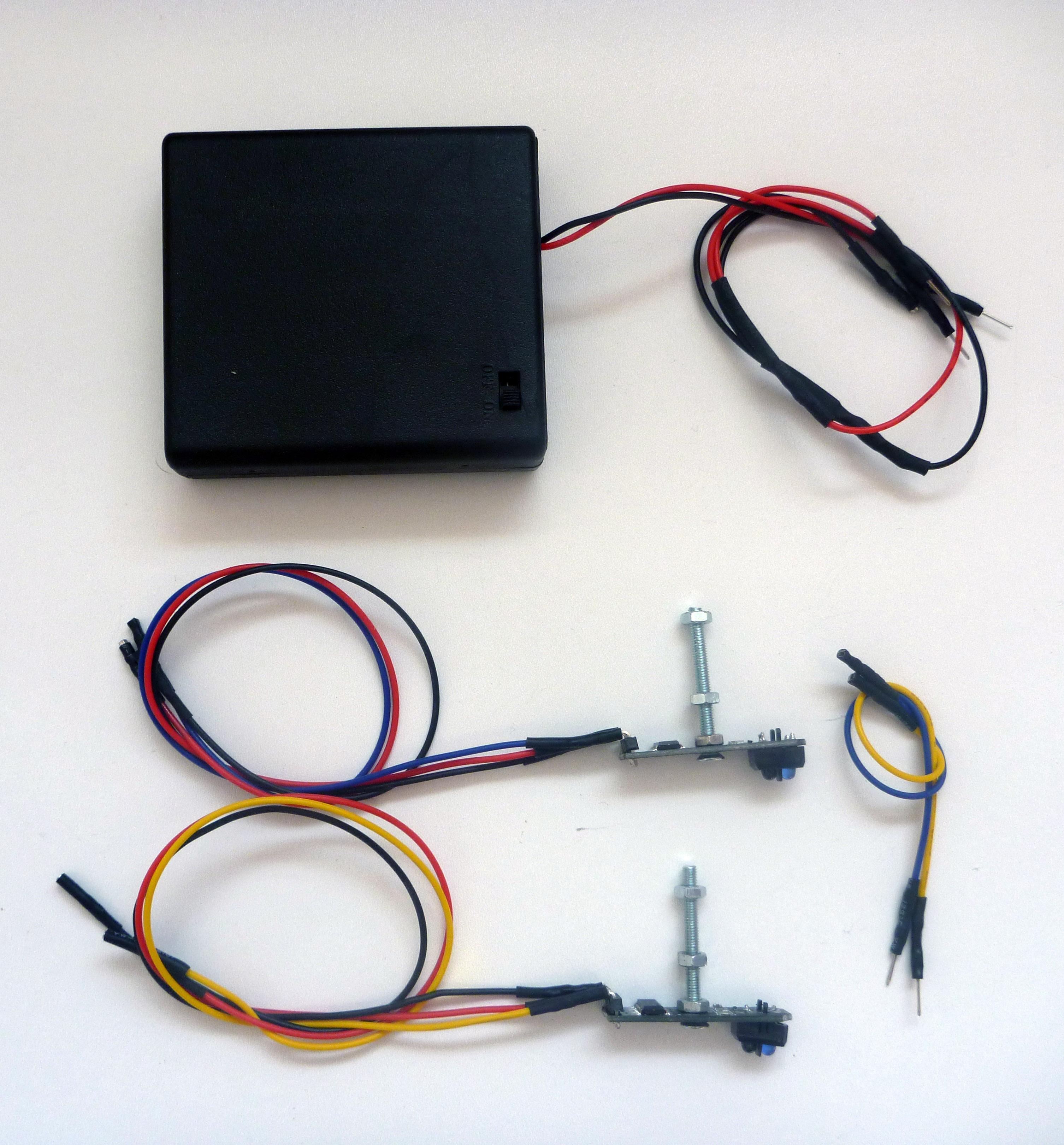
Hjulene sættes på servomotorerne. Hvis servomotorerne sidder lidt løst i deres holdere, kan du sætte et eller flere lag tape på servomotorerne. I første omgang skal de lange maskinskruer (30 mm) og to møtrikker sættes godt fast på IR tracker sensorer – se billedet. Når det er gjort placeres en møtrik et godt stykke ned på hver af maskinskinskruerne. Herefter kan IR tracker sensorerne sættes fast i holderen. En IR tracker sensor skal placeres ca. 3-5 mm over bordfladen.
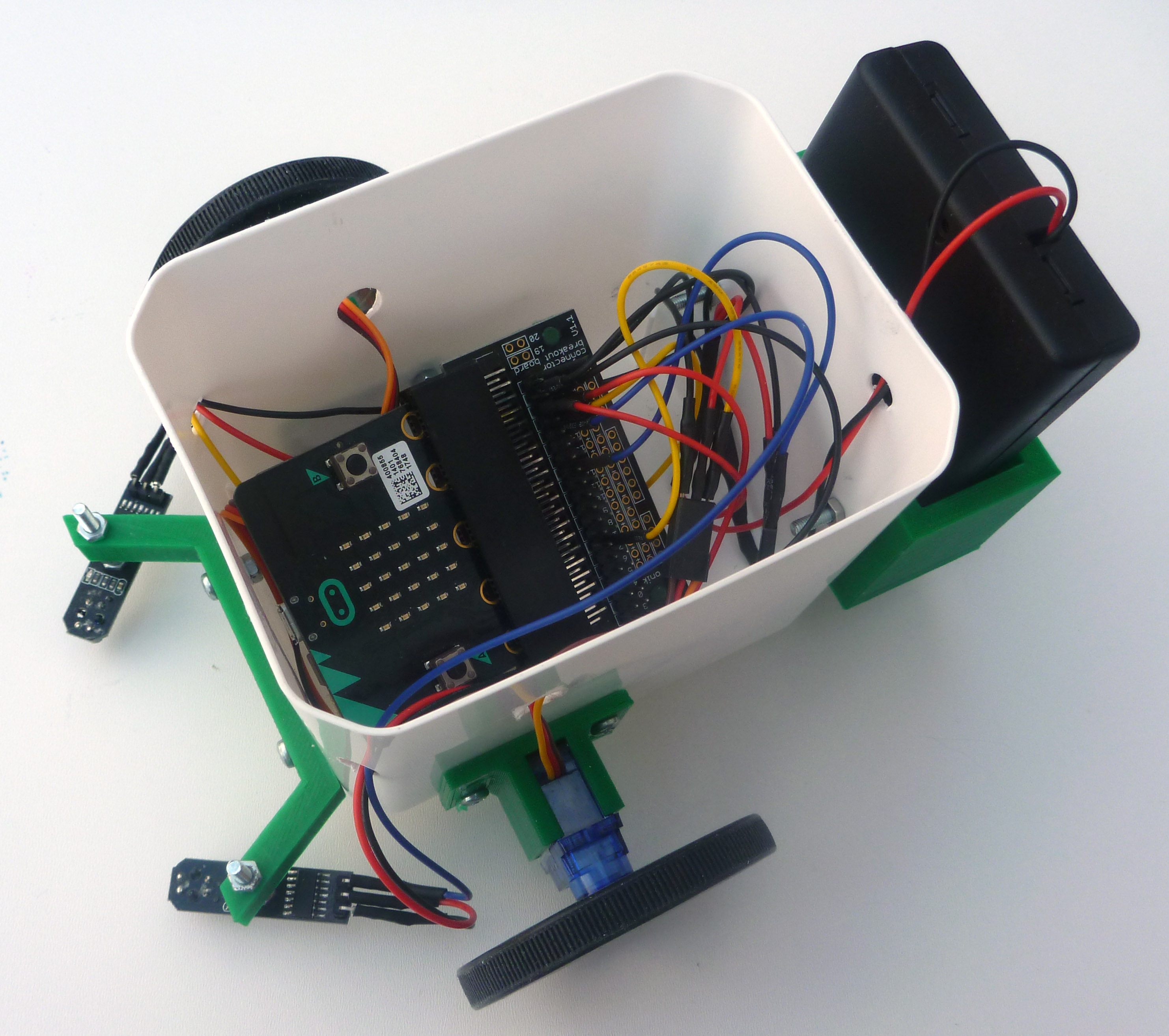
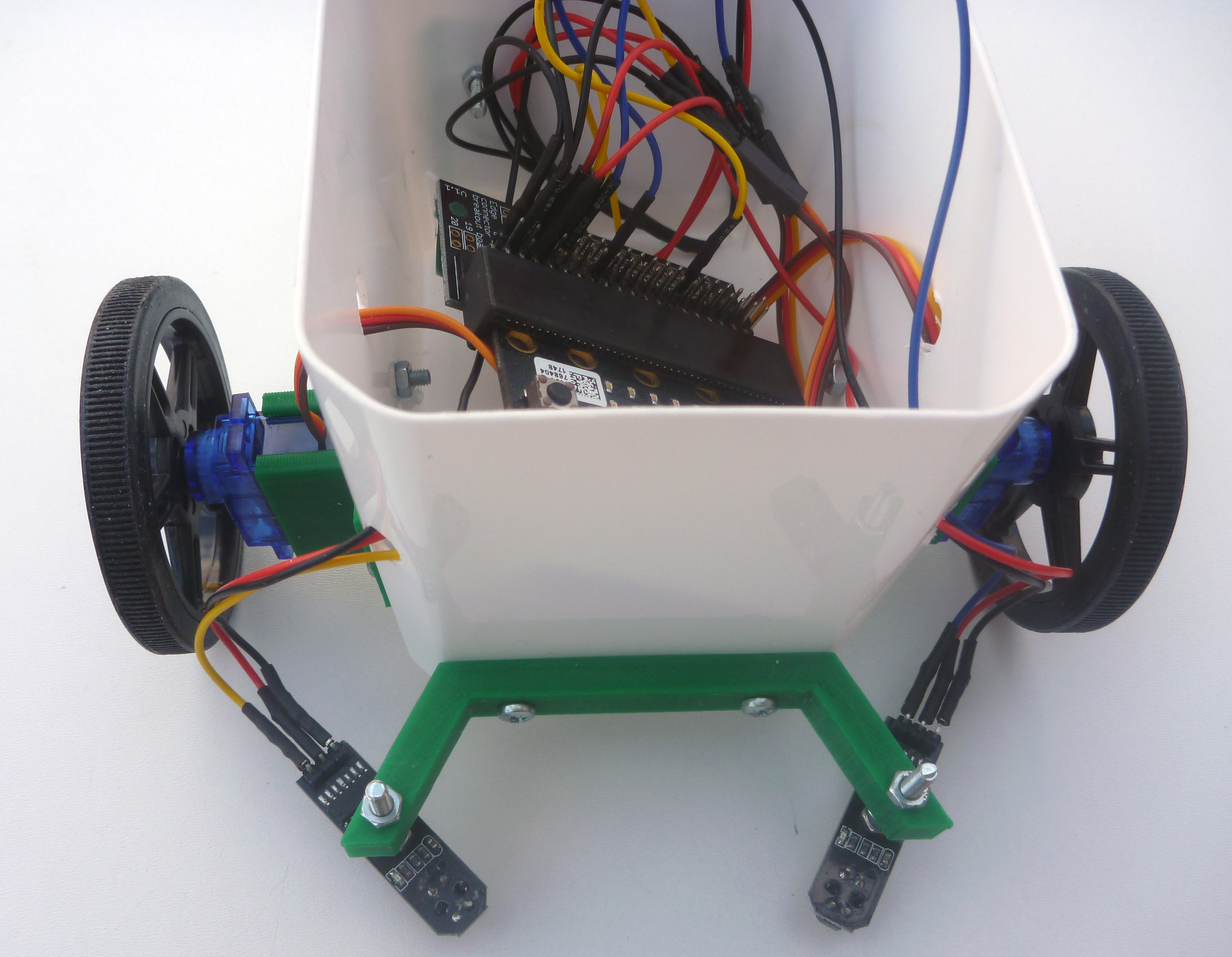
Komponentplacering:
Programmet:
Download denne zip-fil – microbit-Line-Follower.zip
Den udpakkede zip-fil indeholder programmet microbit-Line-Follower.hex
Filen skal downloades til din micro:bit.